Integrity for GNSS Velocity and Time
Dennis Kulemann, M. Sc.
Supervisor: S. Schön; Co-Supervisor:
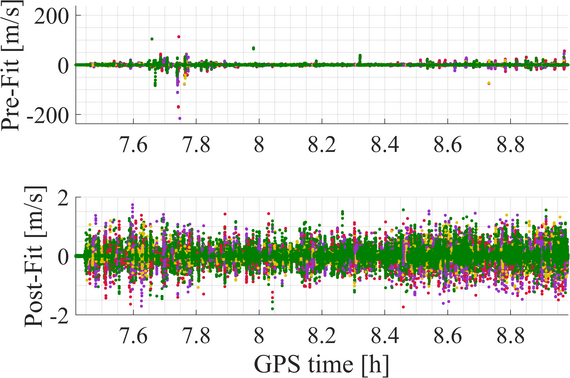
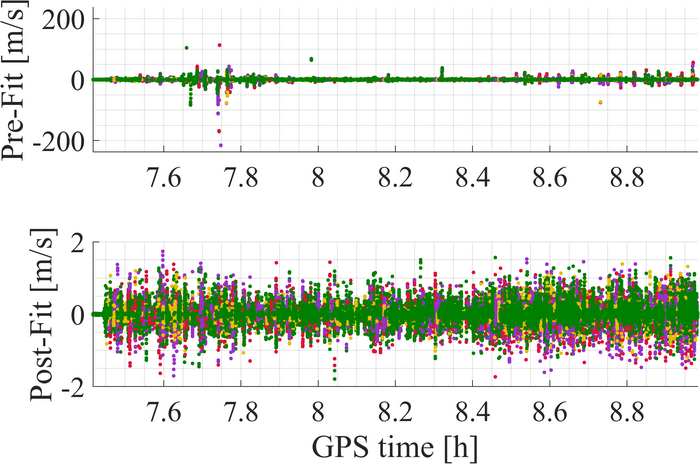
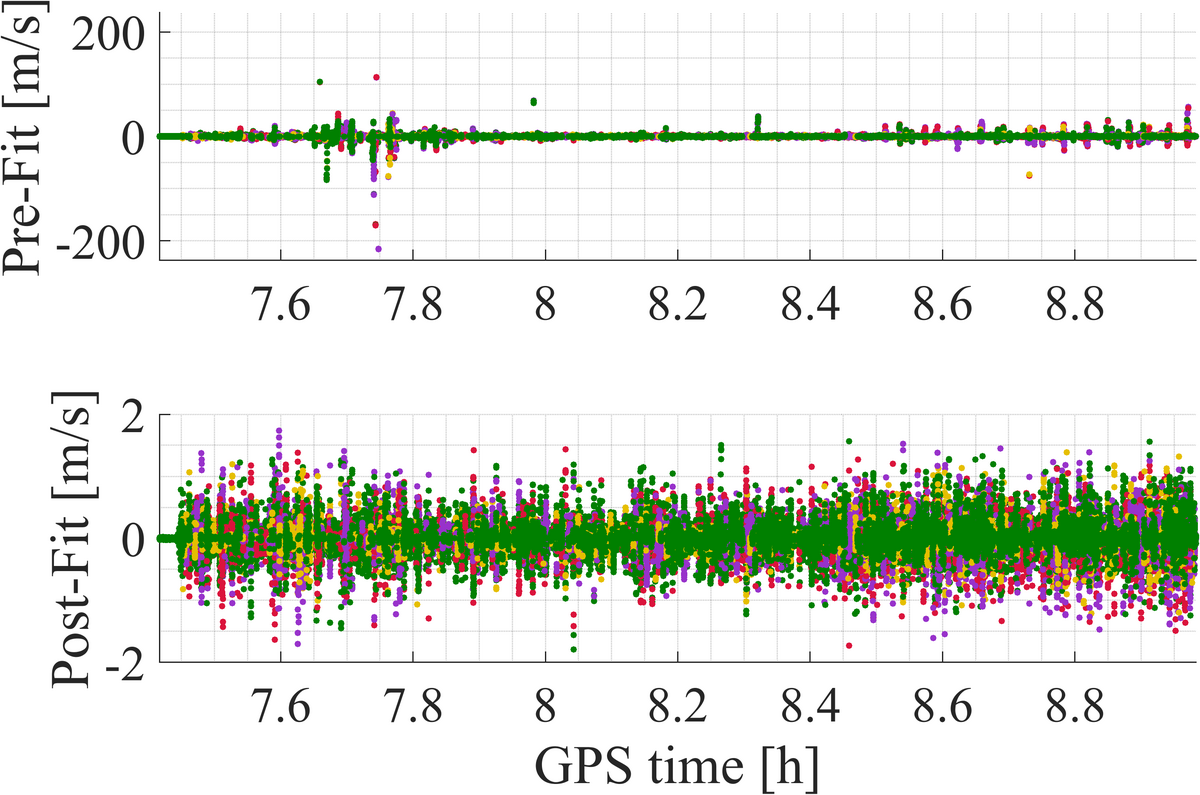
Precise and reliable velocity estimation is mandatory for many autonomous navigation applications like path prediction, sensor fusion or collision avoidance in traffic light free cities. The Global Navigation Satellite System (GNSS) is the only system, which is able to provide an absolute velocity, which can be obtained either by a so called instantaneous velocity or average velocity, where the latter method needs observations of at least two consecutive epochs. An instantaneous velocity can only be estimated by the GNSS Doppler observation, whereas an average velocity can be estimated by different observation types. The focus in this work will be on Doppler and time-differenced carrier phase observations (TDCP), where Doppler observations deliver a velocity accuracy on the cm/s level and the TDCP observations can achieve an accuracy on the mm/s level, both in good visibility conditions.
The overall goal of this work is to define an integrity measure for GNSS (and maybe also INS) velocity and time. Furthermore, the benefits of the defined measures on the position domain should be examined, i.e. it should be analyzed if a velocity integrity measure has an impact on the position domain and its integrity. Therefore, the error budget will be classified for different scenarios and an alert-limit (AL) will be defined by investigating the noise magnitude for different signal categories, i.e. line-of-sight (LOS), non line-of-sight (NLOS), multipath (MP) and blocked signals.
In GNSS observations the assumption is made, that the observations are normal distributed. This is valid for most of the cases and a relatively easy case, as the distribution can be described by a mean (usually zero-mean) and a standard deviation, depending on the observation type. However in multipath environments, this assumption is not always valid. In this work the behavior and distributions of the observations errors will be analyzed. Based on the results, a filter solution will be implemented, considering the respective distributions and developing integrity measures for GNSS velocity and time.



Schneiderberg 50
30167 Hannover



