Sara El Amrani, M. Sc.
Main Supervisor: F. Rottensteiner; Co-Supervisor: C. Heipke
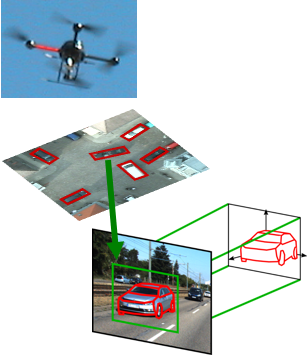
This PhD project investigates the potential contribution of aerial images captured by a UAV for the collaborative positioning of vehicles. A UAV takes aerial images of a traffic area, e.g. a crossroads. The images show vehicles which are assumed to be able to communicate with each other and with the UAV. The vehicles are equipped with stereo cameras and can therefore position themselves relative to each other. These relative poses can increase the relative accuracy of the positioning, but an unfavorable configuration of the block obtained in this way is to be expected due to visual restrictions. The aerial images can support the block geometry due to a better overview and less occlusions. For this purpose, suitable methods have to be found to recognize the vehicles visible in a UAV image and to reconstruct their 3D shapes. On the one hand, the vertices of the reconstructed vehicle models can serve as tie points for positioning vehicle models in object space; on the other hand, in this way the parameters of the vehicle model can be estimated consistently from the entire available information (stereo images from the vehicles, UAV images). At the same time, a collaborative tracking of the objects over the time that they can be observed from the UAV should take place. Compared to the vehicle reconstruction method already developed as part of i.c.sense, the challenge lies in the lack of stereo information and the unfavorable viewing direction from above for the use of pre-trained classifiers. Furthermore, the problem of collaborative tracking has to be solved. For evaluation purposes, real data are to be recorded in the context of the central experimentation facility, using a UAV and several vehicles equipped with stereo cameras at road crossings.
Nienburger Straße 1
30167 Hannover
Nienburger Straße 1
30167 Hannover




