Sören Vogel, M. Sc.
Erstbetreuer: I. Neumann; Co-Betreuer: C. Brenner
Active research on the development of autonomous vehicles has been carried out for several years now. However, some significant challenges still need to be solved in this context. Particularly relevant is the constant guarantee and assurance of the integrity of such autonomous systems. In order to ensure safe manoeuvring in the direct environment of humans, an accurate, precise, reliable and continuous determination of the vehicle’s position and orientation is mandatory. In geodesy, this process is also referred to as georeferencing with respect to a superordinate earth-fixed coordinate system. Especially for complex inner-city areas, there are no fully reliable methods available so far. The otherwise suitable and therefore common Global Navigation Satellite System (GNSS) observations can fail in urban canyons. However, this fact does not only apply exclusively to autonomous vehicles but can generally also be transferred to any kinematic Multi-Sensor System (MSS) operating within challenging environments.
Especially in geodesy, there are many MSSs, which require accurate and reliable georeferencing regardless of the environment. This is indispensable for derived subsequent products, such as highly accurate three-dimensional point clouds for 3D city models or Building Information Modelling (BIM) applications. The demand for new georeferencing methods under aspects of integrity also involves the applicability of big data. Modern sensors for capturing the environment, e.g. laser scanners or cameras, are becoming increasingly cheaper and also offer higher information density and accuracy. For many kinematic MSSs, this change leads to a steady increase in the amount of acquired observation data. Many of the currently methods used are not suitable for processing such amounts of data, and instead, they only use a random subset. Besides, big data also influences potential requirements with regard to possible real-time applications.
If there is no excessive computing power available to take into account the vast amounts of observation data, recursive methods are usually recommended. In this case, an iterative estimation of the requested quantities is performed, whereby the comprehensive total data set is divided into several individual epochs. If the most recent observations are successively available for each epoch, a filtering algorithm can be applied. Thus, an efficient estimation is carried out and, with respect to a comprehensive overall adjustment, generally larger observation sets can be considered. However, such filtering algorithms exist so far almost exclusively for explicit relations between the available observations and the requested estimation quantities. If this mathematical relationship is implicit, which is certainly the case for several practical issues, only a few methods exist or, in the case of recursive parameter estimation, none at all. This circumstance is accompanied by the fact that the combination of implicit relationships with constraints regarding the parameters to be estimated has not yet been investigated at all.
In this project, a versatile filter algorithm was investigated, which is valid for explicit and for implicit mathematical relations as well. The specific realisation takes place within an iterated extended Kalman filter (IEKF). For the first time, methods for the consideration of constraints were given, especially for implicit relations. Thus, various existing methods for using hard or soft constraints on explicit relations are adapted accordingly. As this is only possible for individual methods under special consideration of arising contradictions, a completely new approach was presented. In addition, the versatile IEKF can also be modified to provide recursive parameter estimation in the Gauss-Helmert model for the first time.
The developed methodology has been comprehensively validated and evaluated by simulations and real-world application examples of practical relevance. The usage of real data is directly related to kinematic MSSs and the related tasks of calibration and georeferencing. The latter especially with regard to complex inner-city environments. In such challenging environments, the requirements for georeferencing under integrity aspects are of special importance. Therefore, the simultaneous use of independent and complementary information sources was applied in this project. This enables a reliable georeferencing solution to be achieved and a prompt notification to be issued in case of integrity violations.
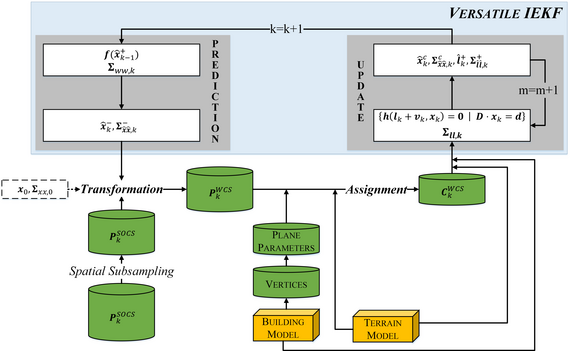
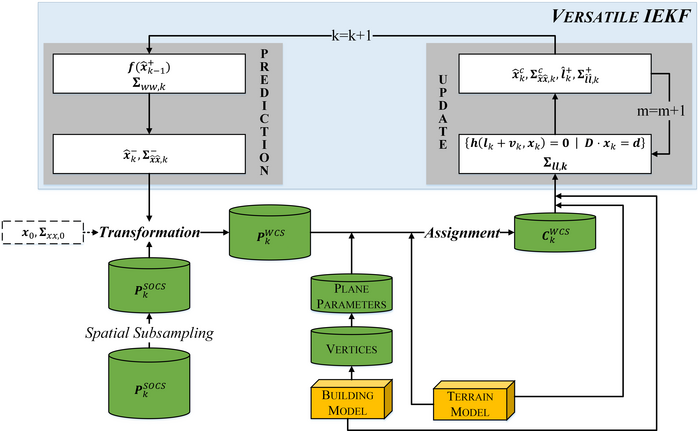
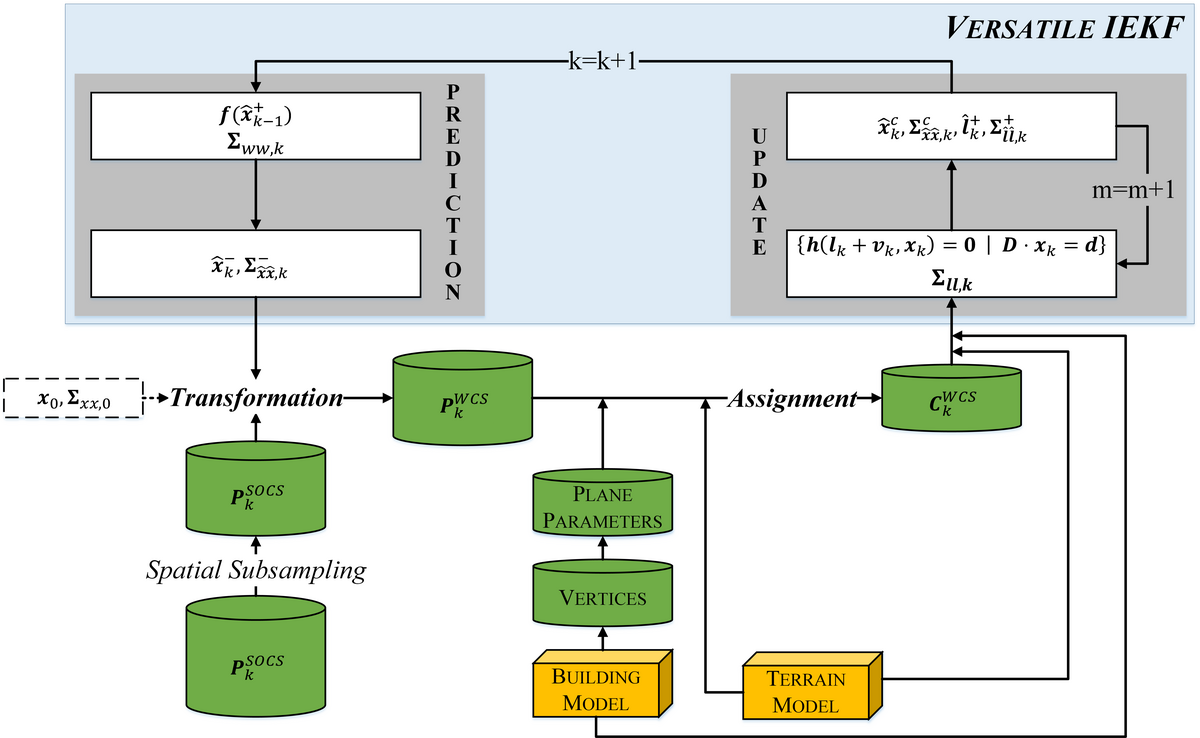
Figure 1: Simplified process of the information-based approach for georeferencing a laser scanner-based MSS in urban areas. Central elements represent the transformation, assignment and application in the versatile IEKF of the 3D point clouds (Pk) within each epoch k. The variable m specifies the iterations within the update step. The start of the flowchart is the acquisition of a 3D point cloud with respect to a sensor own coordinate system (SOCS) for the first epoch k = 1 (lower left corner). A building model of the urban environment and a digital terrain model serve as independent information (yellow boxes).
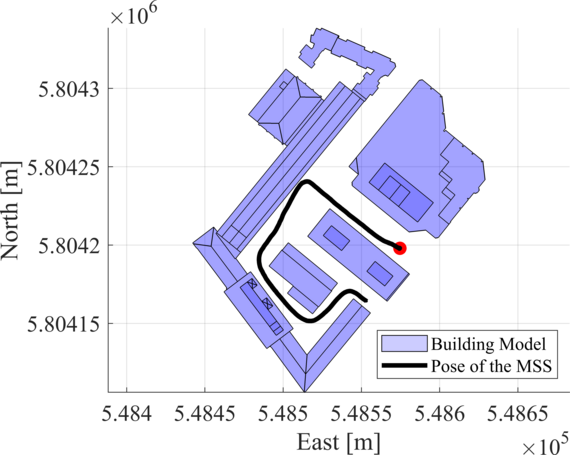
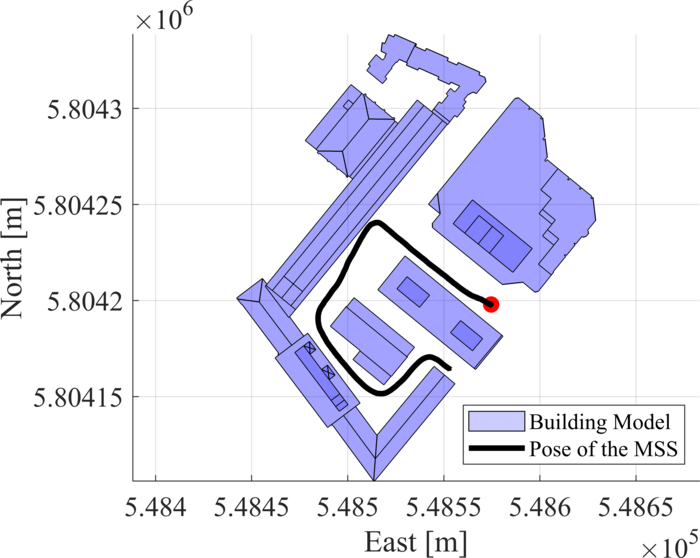
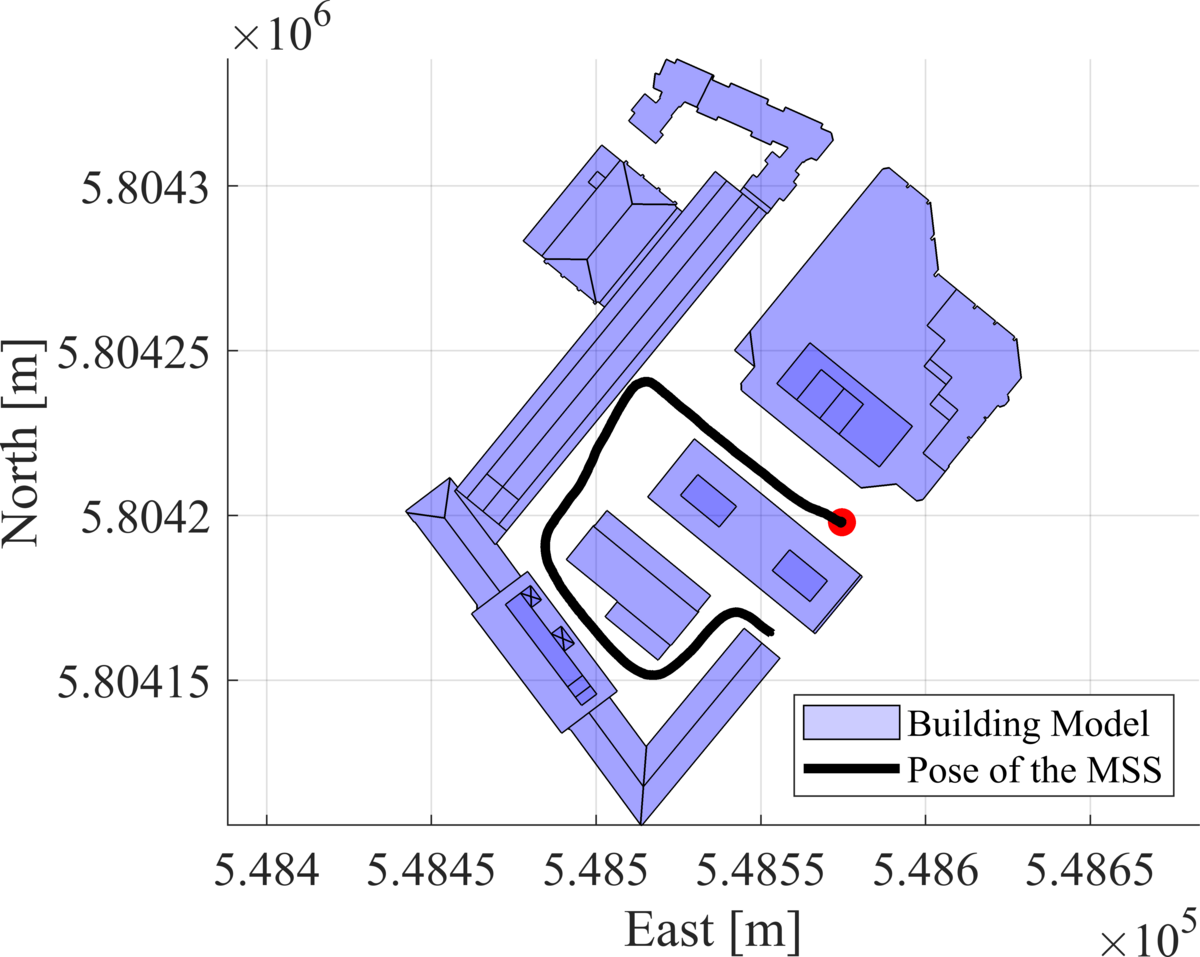
Figure 2: Representation of the estimated trajectory (black line) over all epochs with respect to the building model (blue). In addition to laser scanner observations of a UAV-based MSS, the versatile IEKF only used the independent information from the building model and DTM for the calculation.
Nienburger Straße 1
30167 Hannover
www.gih.uni-hannover.de
Nienburger Straße 1
30167 Hannover
www.gih.uni-hannover.de



