Yuehan Jiang, M. Eng.
Erstbetreuer: B. Wagner Co-Betreuer: C. Brenner
Simultaneous Localization and Mapping (SLAM) is an essential ability for mobile robots to navigate in unknown environments. Without any prior knowledge of the surrounding environment, it becomes crucial for the robot to estimate its current location accurately while building a map of its surrounding environment based on sensor data. One major problem of SLAM is the divergence problem, i.e. the estimation of the robot position will drift away from its true position over time. Whether this divergence of the odometry algorithm can be appropriately identified and modeled is of great importance and one main goal of this research. In the dominant probabilistic SLAM approaches Gaussian distribution is used as an approximation of the sensor error, which could underestimate the divergence when the real error model is very different. This is the case of LiDAR measurements, which can contain non-Gaussian systematic errors.
Interval analysis can be leveraged for uncertainty measurement without knowing the exact probability distribution of quantities, providing the lower and upper bounds which guarantee to include the true value. Inspired by interval analysis, this dissertation aims to build a guaranteed LiDAR SLAM system for real robot in real environments. Interval analysis will also be applied to provide guaranteed uncertainty for the SLAM odometry, which can identify the divergence of SLAM as the uncertainty of robot position grows.
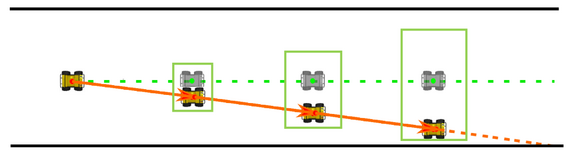
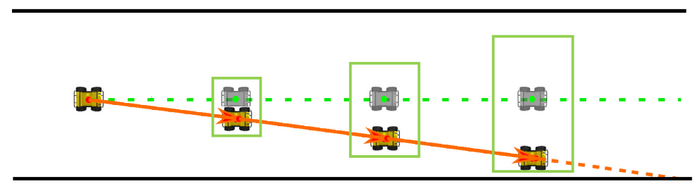
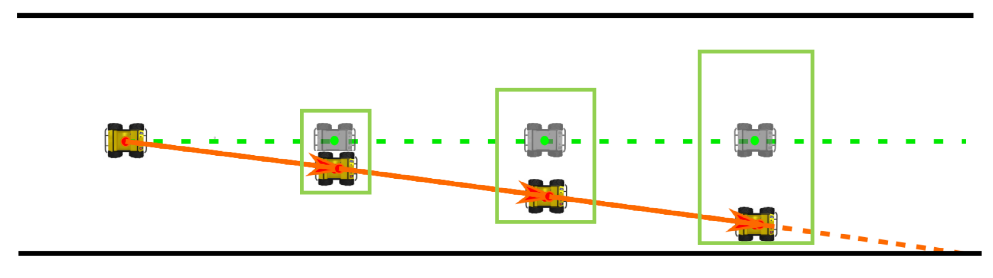
In this dissertation, a real-time LiDAR-based SLAM system with guaranteed uncertainty is proposed. Interval-based methodolodies will be developed to provide bounded sensor noise and guaranteed odometry uncertainty estimation. In particular, in order to make the LiDAR odometry run in real time, the feature-based data association method (LOAM, Zhang et al., 2017) is considered. Interval-based edge and planar features extraction and registration methods will be investigated and the according uncertainty will be propagated to the interval-based odometry.
Real Time Systems Group
Appelstraße 9A
30167 Hannover
Real Time Systems Group
Appelstraße 9A
30167 Hannover



